


传统的真空灭弧室真空度测量方法只在一定的真空度范围内测量精度较高,且易受外界干扰,为了获得准确的真空度数据,使用横磁场脉冲磁控法和改进的屏蔽罩电位法测量真空度,利用联合卡尔曼滤波器对测量数据进行融合。根据真空灭弧室的离线检测方式和真空度变化的规律确定了联合卡尔曼滤波的初始值和系数矩阵。实验证明这种方法具有良好的容错性,能够有效抑制外部噪声对测量系统的干扰,提高测量数据的稳定性和准确度。
随着我国电力系统无油化改造的顺利实施和电力设备制造技术的飞速发展,真空断路器的使用日趋普及。真空断路器具有体积小、重量轻,环境污染小;开端容量大,灭弧性能好;适合频繁操作,可靠性高,电寿命长等优点。在6~35kV电压等级断路器中占有主导地位,还正在向高电压(72.5kV以上)、低电压(380V~3kV)两极发展。真空断路器是以真空作为绝缘和灭弧手段的断路器,真空度直接影响断路器的性能。目前较为实用的真空度测量方法是横磁场脉冲磁控法和改进的屏蔽罩电位法,实行离线检测,即不必测量正在工作的真空
断路器的真空度,只需在定期检修时测量。但这两种测量方法只在一定的真空度范围内测量精度较高,脉冲磁控放电法能够测量的灭弧室真空度的量程范围为10-1~10-4 Pa,而屏蔽罩电位法只有在真空度处于10-1~1Pa时测量更精确。同时由于真空断路器所处的磁场、电场环境比较恶劣,单一传感器可能会因为故障或干扰导致测量不准确。若采用多个传感器,通过数据融合的方法把不同种类的传感器所提供的观测量加以综合,可以消除多个传感器之间可能存在的矛盾,降低不确定性,从而获得真空度准确的状态估计,提高设备状态检测系统故障的准确性。
常用的数据级的数据融合方法有基于均值的递推融合算法、小波分析法、卡尔曼滤波器法等。卡尔曼滤波器采用最优化递归处理算法,能根据测量结果实时自动调整滤波器系数,提高融合精度。但传统卡尔曼滤波数据融合有其不足的地方,当其中一个传感器出现故障造成数据信息错误时,对最终数据融合结果影响较大,也就是系统的鲁棒性较差。联合卡尔曼滤波弥补了上述不足,采用信息分配原理,能及时有效地检测传感器的故障,进一步提高系统的总体性能。
本文以联合卡尔曼滤波算法为基础,得到了多个传感器的最优融合数据,该方法可以获得比传统的单独一种真空度测量方法更有效、更可靠的数据,提高了真空度检测的精度。
1、原理与模型的建立
联合卡尔曼滤波是一种特殊的分散式卡尔曼滤波器,分为局部滤波器和主滤波器两部分。每个传感器的测量值只提供给对应的局部滤波器,各局部滤波器并行处理,获得建立在局部测量基础上的局部最优估计。这些局部最优估计值又在主滤波器中进行进一步的融合处理,从而获得建立在所有测量值基础上的全局最优估计。然后主滤波器根据信息分配权值对局部滤波器进行反馈重置,提高局部滤波器的精度。本文采用横磁场脉冲磁控法和屏蔽罩电位法测得真空灭弧室的真空度,之后由DSPF2812对信号进行采集和融合处理。联合卡尔曼滤波器的结构如图1所示。
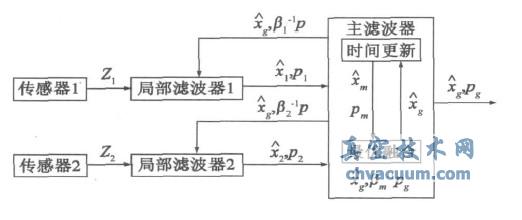
图1 联合卡尔曼滤波器的结构
端口ADCINB0的数据在[1.450,1.900]的范围内波动,在第2500Ls左右,测量数据出现异常波动。该组数据平均值为1.663V,方差为0.0380。测量数据无收敛趋势,受外界因素的影响较大。该组数据为卡尔曼滤波器处理后的电压值,在实验开始阶段数据波动较大,甚至超过单传感器测量数据的[1.450,1.900]的范围,但随着实验的继续进行,数据的收敛趋势明显,而且在2500Ls左右有效地抑制了数据的异常波动。处理后的数据平均值为1.657V,方差为0.0048,相对于未经处理的数据,降低了一个数量级。
考虑到真空度测量时的测量噪声、状态噪声无法准确获得,采用的是合理假设后的估计值,使得最终的融合数据仍有一定幅度的波动。总的来说卡尔曼滤波器数据融合方法能有效地提高数据的一致性,降低外界环境的变化对测量结果的影响。
4、结论
本文针对单独一种测量方法测量灭弧室真空度不准确的问题,提出了采用两种不同方法测量,并使用基于联合卡尔曼滤波器的数据融合方法,对测量数据进行处理。仿真实验表明该方法的有效性,能够有效解决单独一种传感器测量真空度不准确的问题。
评论
发表

- 2020-06-21
上海指星电气有限公司官网上线! - 2020-12-14
特高压输电技术为中国电力领域带来的影响 - 2020-12-14
东方风电:“十三五”从“追赶”到“领跑”... - 2020-12-14
国网盐城公司:减轻企业用电成本显担当 - 2020-12-05
新型VEF(C)-12GD系列侧装固封式... - 2020-10-31
我国真空断路器行业的发展历史 - 2020-10-31
南方电网加快推进IPv6规模部署 - 2020-10-31
海南首个智能变电站建成投运 海南电网主网... - 2020-10-31
2020年全球新兴微电网市场发展现状、面... - 2020-10-31
新型城镇能源互联网关键技术取得突破